|
If
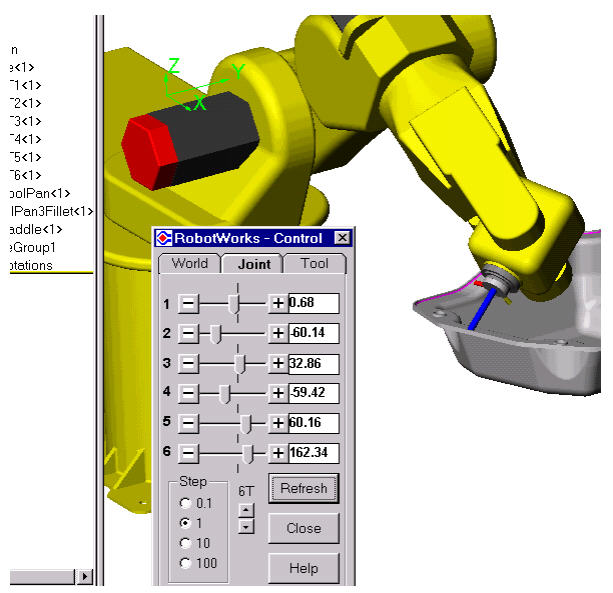
so instructed the simulation will stop when one of the joint
limit is reached or exceeded. In addition, you can manually
make small modifications to the tool location and orientation
(using 'World', 'Joint' or 'Tool' coordinate system) and
record the change to that point. This is a great benefit for
small parts, as you can zoom in and see very small movements,
impossible to see if you were driving a real robot.
This might also be a clean way to override the geometry driven
path location, and introduce a 'better' location for a point,
based on your own judgment.
Until you are happy with the results, there is no reason to go
into the database phase. Just correct, edit, and run again,
and again. It is, after all, merely a matter of seconds.
Once the number and location of points are satisfactory, add
events to the database. This is the second way of seeing the
path, where you can run the events, jump from event to event,
and see a graphic indication when the robot passes a point
having an event and the event details.
Download this
article in PDF
|
