|
What am I
doing here?
Robots don't just move from here to there, but activate
hardware and tools at points along the way. This activity or
event is attached to a point, and the robot takes care of it
when it reaches that point during motion.
While the path itself may be entirely geometry driven, events
require the knowledge of the robotic process itself. Sometimes
the design engineer may do it himself. Usually the robot
operator, engineer or supervisor will need to add their touch
to the final outcome by supplying the missing events.
Once the path is made and visualized from beginning to end,
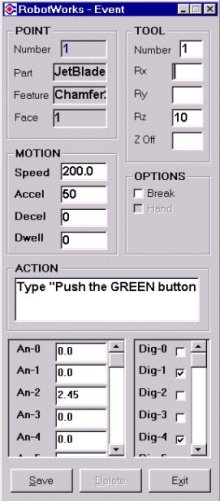
you can scroll slowly along the path one point at a time, with
the tool shown at each point. One click opens an event form,
where you click or enter the actions you want the robot to
take at that point.
Event includes many options. You can trigger a digital output,
set voltage of an analog output, change tool, set speed and
tool offsets, and more. For example, in painting application
you can change the nozzle angle at both ends of a pass while
turning the spray off and on.
All the event data is gathered into a database, accessible to
other Windows programs. Later a software driver written in the
robot native language may use this data to create a complete
robot program, not just 'where to go' but also 'what to do
when you get there'.
You can also convert the numeric data of location and
orientation to many formats, paste it into spreadsheets and
manipulate the data further to suit your particular need.
Download this
article in PDF
|
